How to use Roboguide for robot simulation and programming?
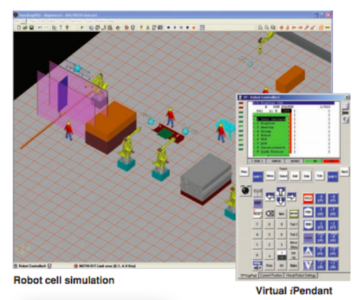
How to use Roboguide for robot simulation and programming? How to use Roboguide for robot simulation and programming? Robot simulation software has become an essential…
Your Ultimate Electronics Knowledge Hub – Components, Circuits, Projects & Technology
How to use Roboguide for robot simulation and programming? How to use Roboguide for robot simulation and programming? Robot simulation software has become an essential…