How to operate a KUKA robot arm for industrial tasks?
How to operate a KUKA robot arm for industrial tasks? How to operate a KUKA robot arm for industrial tasks? Operating a KUKA robot arm…
Your Ultimate Electronics Knowledge Hub – Components, Circuits, Projects & Technology
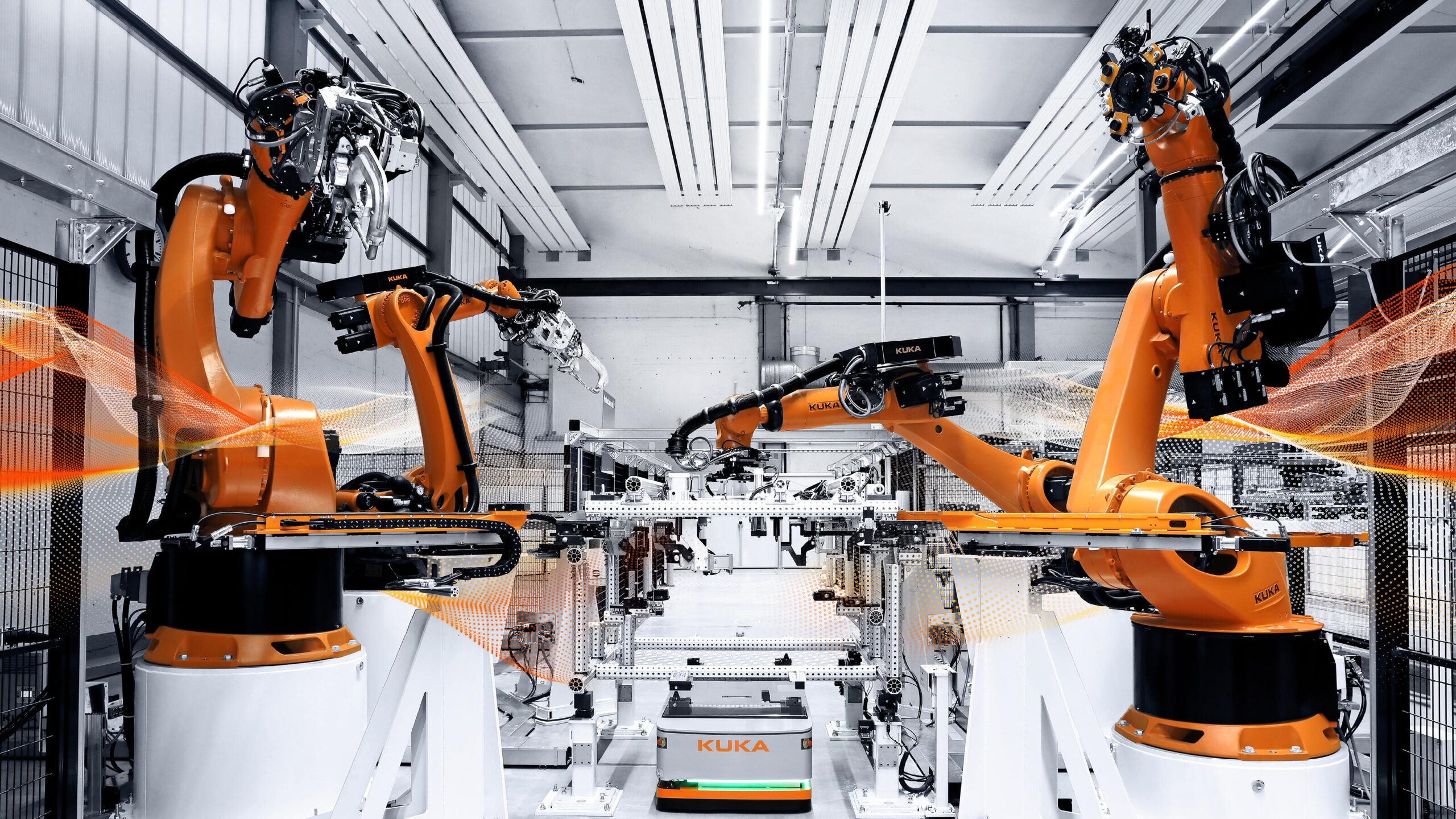
How to operate a KUKA robot arm for industrial tasks? How to operate a KUKA robot arm for industrial tasks? Operating a KUKA robot arm…