How to Control a Stepper Motor with STM32
Stepper motors are a type of brushless DC electric motor that divides a full rotation into a number of discrete steps. They are commonly used in various applications, such as 3D printers, CNC machines, robotics, and more. In this article, we will discuss how to control a stepper motor with STM32 microcontroller.
Step 1: Understanding Stepper Motors
Before we dive into the details of controlling a stepper motor with STM32, it is important to understand how stepper motors work. Unlike traditional DC motors, stepper motors move in precise increments called steps. Each step is a discrete movement, and the motor rotates a specific number of steps to achieve a full rotation.
Step 2: Choosing the Right Stepper Motor Driver
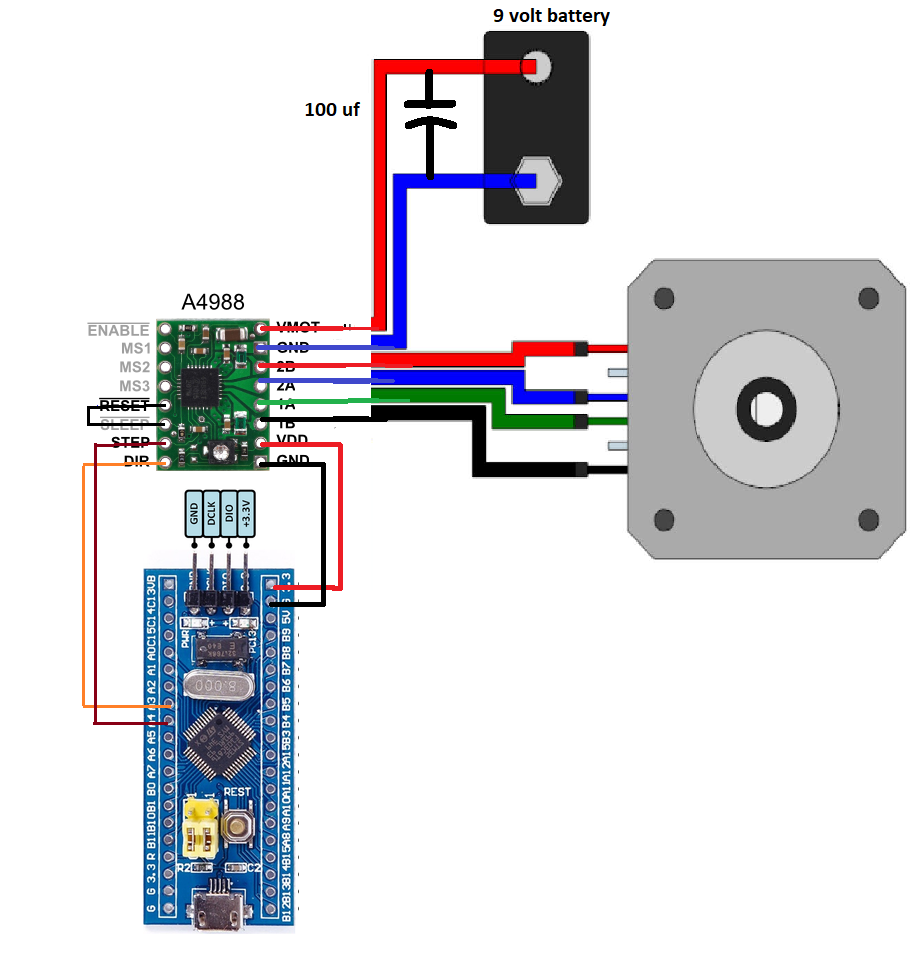
To control a stepper motor with STM32, you will need a stepper motor driver. There are various types of stepper motor drivers available, such as the A4988, DRV8825, and TMC2208. The choice of the stepper motor driver will depend on factors such as the current rating of the motor and the desired step resolution.
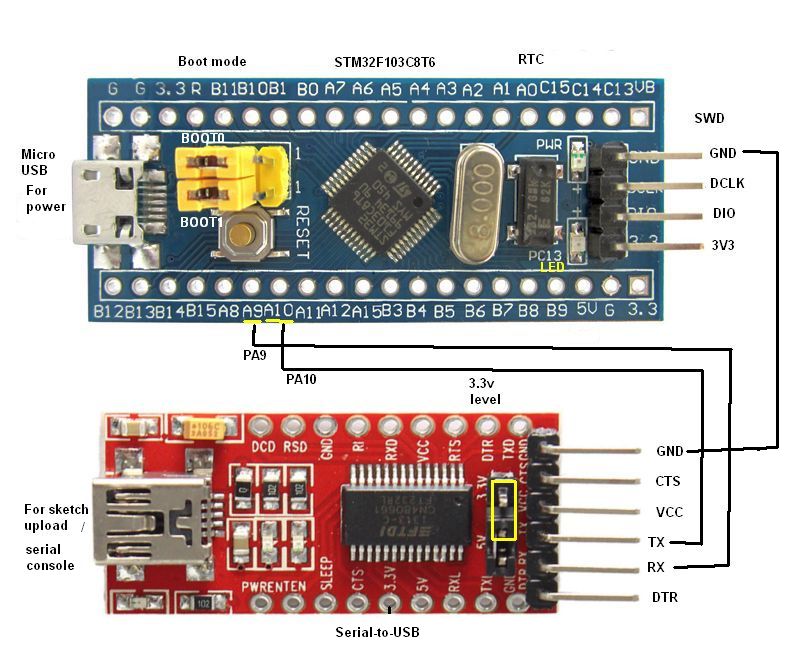
Step 3: Connecting the Stepper Motor Driver to STM32
Once you have chosen the right stepper motor driver, you will need to connect it to the STM32 microcontroller. Make sure to follow the wiring diagram provided by the manufacturer of the stepper motor driver. Typically, you will need to connect the STEP, DIR, ENABLE, and GND pins of the driver to the corresponding pins on the STM32.
Step 4: Writing the Control Code
Now that you have connected the stepper motor driver to the STM32, it is time to write the control code. You can use the STM32CubeIDE or any other Integrated Development Environment (IDE) to write and compile the code. The code will need to generate the STEP pulses to control the movement of the stepper motor.
Step 5: Testing the Stepper Motor
After writing the control code, you can upload it to the STM32 microcontroller and test the stepper motor. Make sure to power the motor driver and STM32 properly before running the code. You can adjust the speed and direction of the motor by changing the parameters in the code.
Step 6: Fine-Tuning the Control Parameters
Once you have tested the stepper motor, you may need to fine-tune the control parameters to achieve the desired performance. This may involve adjusting the step resolution, acceleration, and deceleration profiles. Be patient and keep experimenting until you get the desired results.
Controlling a stepper motor with STM32 can be a rewarding experience. With the right tools and knowledge, you can create precise and efficient motion control systems for a variety of applications. Remember to refer to the datasheets of the stepper motor driver and STM32 microcontroller for detailed specifications and guidelines.
Thank you for reading and happy tinkering!
How to Control a Stepper Motor with STM32
Stepper motors are a type of brushless DC electric motor that divides a full rotation into a number of discrete steps. They are commonly used in various applications, such as 3D printers, CNC machines, robotics, and more. In this article, we will discuss how to control a stepper motor with STM32 microcontroller.
Step 1: Understanding Stepper Motors
Before we dive into the details of controlling a stepper motor with STM32, it is important to understand how stepper motors work. Unlike traditional DC motors, stepper motors move in precise increments called steps. Each step is a discrete movement, and the motor rotates a specific number of steps to achieve a full rotation.
Step 2: Choosing the Right Stepper Motor Driver
To control a stepper motor with STM32, you will need a stepper motor driver. There are various types of stepper motor drivers available, such as the A4988, DRV8825, and TMC2208. The choice of the stepper motor driver will depend on factors such as the current rating of the motor and the desired step resolution.
Step 3: Connecting the Stepper Motor Driver to STM32
Once you have chosen the right stepper motor driver, you will need to connect it to the STM32 microcontroller. Make sure to follow the wiring diagram provided by the manufacturer of the stepper motor driver. Typically, you will need to connect the STEP, DIR, ENABLE, and GND pins of the driver to the corresponding pins on the STM32.
Step 4: Writing the Control Code
Now that you have connected the stepper motor driver to the STM32, it is time to write the control code. You can use the STM32CubeIDE or any other Integrated Development Environment (IDE) to write and compile the code. The code will need to generate the STEP pulses to control the movement of the stepper motor.
Step 5: Testing the Stepper Motor
After writing the control code, you can upload it to the STM32 microcontroller and test the stepper motor. Make sure to power the motor driver and STM32 properly before running the code. You can adjust the speed and direction of the motor by changing the parameters in the code.
Step 6: Fine-Tuning the Control Parameters
Once you have tested the stepper motor, you may need to fine-tune the control parameters to achieve the desired performance. This may involve adjusting the step resolution, acceleration, and deceleration profiles. Be patient and keep experimenting until you get the desired results.
Controlling a stepper motor with STM32 can be a rewarding experience. With the right tools and knowledge, you can create precise and efficient motion control systems for a variety of applications. Remember to refer to the datasheets of the stepper motor driver and STM32 microcontroller for detailed specifications and guidelines.
Thank you for reading and happy tinkering!